

普通话
英语
0
1
2
3
4
5
0
1
2
3
4
5
 ********
******** ********
********我是Maddie,一位热衷于技术和创新的Unity引擎工程师,专注于游戏开发、可视化工具以及深度学习与人工智能的应用。我精通基于Unity和Unreal Engine的开发工作,能够实现复杂的图形渲染、实时交互及多平台兼容性,致力于打造用户友好的沉浸式体验。
专业领域:
Unity和Unreal Engine开发:擅长创建高效、互动性强的游戏和可视化应用,涵盖节点编辑器、物理模拟等领域。
深度学习与AI:参与多种基于Python的机器学习和深度学习项目,熟悉模型训练、优化及应用,尤其在自然语言处理和目标检测中有较强经验。
跨领域技术应用:熟练将AI、计算机视觉、3D建模等领域技术融合,尤其是在游戏开发和可视化系统中,提升产品创新与性能。
我相信项目成功不仅仅是技术上的实现,更是理解客户需求与保持高效沟通的结果。从需求分析到最终交付,我会确保每个环节都高效执行,并确保最终成果符合您的预期。
如果您有项目或合作需求,请随时联系我,我期待与您一起创造出色的技术产品。
2020-08-10 -至今河南伟达电子技术有限公司研发副总
Unity 系统软件开发 Unity 引擎研究 系统相关插件应用技术研究前沿技术设计模式技术问题数据结构和算法 最新技术研发、项目把控以及研发日常。
2019-02-13 -2020-07-24河南省爱普尔信息科技有限公司Unity研发从工程师
1、 Unity 系统相关插件应用 2、 物理学及 UI 应用 3、 虚拟场景漫游于制作
2017-06-28 -2018-03-05宁波环球广电科技有限公司电子研发工程师
25G、100G、200G光模块研发、光学调节实验、实验研究以及部分电路调试。 CWDM SFP 光模块采用 CWDM 技术,可以通过外接波分复用器,将不同波长的光信号复合在一起,通过一根光 纤进行传输,从而节约光纤资源。同时,接收端需要使用波分解复用器对复光信号进行分解。主要研究:光模块眼图各项参数(Sen、Crossing、Margin、TRx Power、SMSR、Jitter PP/Res、Los A/D等)测试校准、Switch 环境丢包测试、出货报告校验等。
2024-05-18 - 2025-05-30北亚利桑那计算机信息技术硕士
College of Egr Info & AppSci(工程、信息与应用科学学院) 数据分析(Data Analytics Emphasis) 核心课程:计算机网络应用和安全、数据库特征分析、数据设计、数据处理、数据可视化.
2015-04-15 - 2017-07-28新乡职业技术学院通信工程专科
核心课程:VS、VivE设备、Portel、DXP、CAD、Keil等

高度还原现实场景:通过1:1还原插花场景及相关素材,提供沉浸式体验。支持多种功能:满足教学、练习和比赛需求,提供丰富的功能支持。提升用户体验:通过VR设备和交互功能,让用户身临其境地进行插花创作。功能完整性:系统功能丰富,满足从基础教学到高级比赛的多样化需求。用户体验:通过VR技术提供沉浸式体验,提升用户参与感和创作乐趣。 系统包含: 1.用户管理:通过账号密码登录,保障软件使用安全。 2.作品管理:支持新建、编辑、保存、收藏、删除作品,提供作品列表搜索功能。 3.编辑功能:提供丰富的编辑工具,包括移动、旋转、修剪、弯曲、替换、复制、还原、删除等。 4.素材库:提供丰富的素材库,包括花材、叶材、枝材、器皿、场景等,满足多样化的插花需求。 5.测量与录制:支持长度测量、视频录制及屏幕快照功能,方便教学和比赛评分。 6.场景切换:提供多种场景选择,如会议室、卧室、客厅等。 7.教学与实训:为教师和学生提供教学和日常实训支持。 8.比赛支持:为一带一路暨金砖国家技能大赛等赛事提供技术支持。 个人创作:为花艺爱好者提供创作和练习平台。

随着自动驾驶技术的快速发展,汽车目标检测与定位成为实现安全、智能交通系统的关键技术之一。本文基于深度学习方法,探讨了三种经典目标检测模型(YOLOv5、Faster R-CNN、SSD)在Car Object Detection数据集上的应用与性能比较。通过对比三种模型的检测精度、推理速度和计算复杂度,评估其在实际自动驾驶任务中的适用性。实验结果表明,Faster R-CNN在检测精度和mAP(平均精度)方面表现最佳,但其推理速度较慢,适用于高计算资源的场景;YOLOv5则以其超快的推理速度成为实时目标检测的首选,尽管其精度相对较低;SSD在精度与速度之间提供了良好的平衡,适合大多数实际应用。最后,本文探讨了不同模型的优缺点,并提出了未来改进的方向,如多尺度注意力机制、模型蒸馏与量化等,以进一步提高检测性能和计算效率。
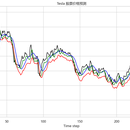
深度学习模型以其强大的特征提取能力和适应非线性问题的特性,在时间序列数据建模中展现出了卓越的表现。与传统方法不同,深度学习模型能够通过自动化学习和提取数据中的潜在模式,从而提供更精准的预测结果。本研究选择了 LSTM、GRU 和 CNN 三种具有代表性的深度学习结构,分别从长期依赖关系、短期波动捕捉和特征提取的角度切入,对它们在 Tesla 股票价格预测中的表现进行了深入对比分析。通过这三种模型的探索,我们希望能更全面地了解深度学习在金融时间序列分析中的潜力和局限性,同时为未来的研究方向提供指导。





