

0
1
2
3
4
5
0
1
2
3
4
5
 ********
******** ********
********接python小项目
在工作中,得益于担任了多个主要学生干部职务,培养出了我的工作能力,愿意承担组织者的任务,积极参与配合并协调上下的工作情况,努力保质保量完成自己的职责;
在学习上,由于本硕均为计算机专业热爱钻研有挑战的任务和新鲜知识,具有较强的动手能力,态度端正,目标明确;
在生活中,待人热情有礼,热爱运动和健康饮食,喜欢了解家国大事和国际新闻。
2018-09-01 -2021-09-23网络仿真与工程实验室研究生
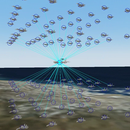
参与网络仿真软件相关的后端开发,三维展示系统的开发,无人机路径规划算法的设计与实现,各种Python小工具的开发,文档撰写
2014-09-01 - 2018-06-30北京交通大学计算机科学与技术本科
学习过编译原理、计算机组成原理、计算机网络原理、计算机体系结构、操作系统和数据库等基础课程; 学习过C语言、C++语言和Java语言。

仿真验证环境除了支持载荷的纯数字仿真外,还可以接入实际载荷传感器吊舱,进行半实物仿真,验证实际载荷的接入能力、操控功能,和实际载荷图像经过通信仿真后的通信延迟、丢包以及在载荷显控终端上的显示效果。 载荷传感器吊舱通过串口模块和视频采集卡到一台载荷上位机上面,载荷上位机工作站和载荷显控终端通过以太网交换机连接在一起。
以传统的平行线式覆盖和生成树算法为基础,设计了应用于未知环境下多无人机覆盖任务的平行线式动态生成树算法并实现; 以MUPLSTC算法为基础,设计了一种能够支持多无人机分布式地进行实时路径规划的网络通信协议MUCTAP(Multi-UAV Coverage Task Application Protocol)并仿真实现。






