

0
1
2
3
4
5
大家好我是佘梦坤,目前是一名在读博士生,就读于德国亥姆霍兹基尔海洋研究院,海洋机器视觉研究组,我们组的主页链接为:
我目前的研究方向为水下视觉三维重建,包括水下相机标定,基于深海机器人的海底地形三维重建,双目立体视觉测量系统,深海机器人的组合导航(视觉+导航数据的融合定位,暂时没有涉及惯性导航系统IMU)。目前博士一年级进入博士二年级,已发表论文可查看ResearchGate主页及谷歌学术
Research gate:
谷歌学术:
更详细的简历可查看领英主页(但是这个不怎么更新):
技术端我比较擅长C++ 和 Python 做3D计算机视觉,立体视觉的编程, 非常熟悉OpenCV、Ceres-Solver(非线性数值优化问题)、COLMAP(SfM)等开源计算机视觉库,了解视觉SLAM系统,但是我们目前的课题暂时没有涉及到视觉SLAM,但是有了解过几个经典的SLAM框架比如ORB-SLAM等。
3D计算机视觉是我的主要方向,但是最近也有涉入一些深度学习的方向,因此也有一些了解,但是深度学习方面我并不认为我是专家,但是会用基本的PyTorch库。
我们的课题方向与深海机器人接触非常多,但我们不涉及机器人的开发和控制,我们只使用机器人获取的数据进行算法研究或者工程应用。我使用过机器人操作系统ROS(Robot Operation System, ROS),写过一些ROS的程序,但是不难,不精通ROS,如果有项目需要用到ROS,摸索着来还是可以的。
最后,我不擅长网页开发及GUI编程,如果实在有GUI编程需求的,慢慢看着文档摸索倒也能行,照葫芦画瓢写过一些GUI,但是水平甚至不如初级开发者。。。
APP扫码和程序员直接沟通
该用户选择隐藏工作经历信息,如需查看详细信息,可点击右上角“和TA聊一聊”查看
2020-11-30 - 德国亥姆霍兹海洋研究所海洋机器视觉博士
目前就读于德国亥姆霍兹海洋研究所,海洋机器视觉组,导师 Dr. Kevin Köser,博士课题的主要研究方向为深海视觉系统的标定,基于相机系统的大规模深海地形三维重建,立体视觉测量系统,水下图像处理及颜色改正,微距相机的标定和三维重建等。

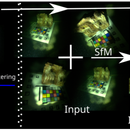
该项目为我目前的主要研究课题,使用超过2000张高清海底图像进行三维重建(Structure from Motion, SfM),图像通过深海机器人的视觉系统来获取(有自主导航的机器人AUV,有远程线控的机器人ROV,但是我们不研究机器人的开发和控制,机器人一般是买来的,并有专门的机器人团队做控制,我们只使用机器人得到的数据进行算法研究)。深海机器人一般配备着多个传感器以及高精度IMU,因此可获取粗略的6个自由度的导航数据。纯粹的视觉三维重建效果并不鲁棒,因此该课题主要研究如何融合导航数据以提高三维重建的精度。目前暂并无发表论文。

本论文主要研究使用微距相机对微小物体三维重建时的相机参数标定研究,并提出了一种新的符合Focus-stacking图像的基于仿射变换的相机投影模型。 该论文发表于2020的International Conference on 3D Vision (3DV),并口头汇报Oral,本论文算是我的第一篇顶级计算机视觉会议论文,3DV虽然不如3大顶会CVPR, ECCV和ICCV,但也是三维计算机视觉领域的顶会了。该论文我是共同第一作者。
该论文是关于水下三维重建以后的模型的色彩改正。为了改正水下三维重建后模型的色彩,我们首先使用最近比较热门的可差分渲染技术(Differentiable Ray-Tracing)来估计灯光的参数及水体的散射系数和反射系数,根据估计得到的参数,再次使用可差分渲染技术来修正三维模型的表面色彩。 该论文最后中稿ICCV 2021的Workshop,2作,涉及到的技术:图像处理,计算机图形学,光线追踪,可差分渲染,基于图像的三维重建






