

C
0
1
2
3
4
5

 ********
******** ********
********2021-01-01 -至今比亚迪软件工程师
负责底盘电子的产品,主要有eps和后轮转向产品的软件开发工作,目前已独立带项目,负责后轮转向项目控制策略开发的相关任务,曾获得2021年度优秀员工荣誉。
2016-09-01 - 2020-06-01哈尔滨工业大学车辆工程本科
哈工大车辆工程本科毕业,哈工大优秀毕业生,专业排名前20%。
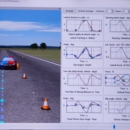
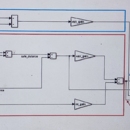
建立汽车运动学模型,建立运动微分方程,加入后轮转向的控制,分析车辆的操控稳定性,输出合适的后轮转角进行控制,并通过carsim和SIMULINK联合仿真,验证控制策略
acc系统通过传感器进行识别,识别出前车的车速和车距信息,然后通过车辆进行合理的控制,输出一定的加速度,将此信息转换成电信号传递给执行机构,从而完成acc控制
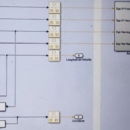
对eps产品的输入信号进行处理,包括传感器的处理,使用游标算法和跟随算法计算得到传感器的转矩和转角值,can信号处理,然后根据助力曲线输出相应的目标力矩。




