

嵌入式
单片机
驱动开发
0
1
2
3
4
5
0
1
2
3
4
5

 ********
******** ********
********⚫较强的软件编程能力,掌握深度学习的基础知识(TensorFlow2.0实现),熟悉 VGG、YOLO、ResNet、LSTM等卷积、 循环神经网络算法,有目标检测的项目实战经验;
⚫ 熟悉 Ubuntu操作系统,在 Ubuntu 上做过深度学习、eclipse和 ROS开发。
⚫ 熟练使用 STM32、TM4C123G、TM4C1294 单片机,编写 AD9954,AD9959,ADS1118,DAC712、HDC1080 等驱动。 ⚫ 熟练使用 PyCharm、Keil等软件,对于 matlab、Visual Studio有一定的使用基础。
⚫ 具有一定的三维建模能力,熟悉 SoildWorks软件,自己构建过工程车、水下四旋翼、水下滑翔机等模型。
2023-09-01 -2023-09-01暂无无
自2017年开始,一直处于求学期间,参加过电子设计大赛,机甲大师、智能车、数学建模等多项比赛,有丰富的经验
2022-09-01 - 哈尔滨工业大学控制科学与工程博士已认证
2021-09-01 - 2022-06-01哈尔滨工业大学机械制造及其自动化硕士已认证
2017-09-01 - 2021-06-01哈尔滨工程大学信息与通信工程本科已认证
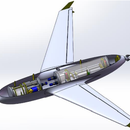
作品依据浮力和姿态角调整来获得推动力,运动轨迹为锯齿形和螺旋式,具 有续航时间长的特点。机器人设置两个舱:浮力舱和姿态舱。分别位于滑翔机的 头部和中心。头部通过水泵进行吸水和排水来控制机器人俯仰角度。中部为一个 姿态舱,在姿态舱中以电池为重物,通过舵机改变电池的左右位置来控制机器人 的侧翻角度。此外,电池盒还可以进行通过丝杆进行前后移动来配合浮力舱实现 俯仰运动,进而实现机器人的对种运动形式。作品创新出在于改变了传统的滑翔 机运动非常缓慢的特点。作品在滑翔机尾部加了一个推进器,可实现随时启动以 适应水下任务的需要。

本系统为可测量电路 RLC 负载值和 50 厘米内开路、短路位置的装置, 主要由 DDS、功率放大器、AD630 鉴相电路、电流检测装置、均方检波器和 单片机检测模块组成。由 DDS 产生信号,在不同负载情况下,经鉴相电路测 得电压和电流相位差,通过阻抗-相角法判断负载类型,单片机检测电压和电 流值实现负载数值及故障类型检测。单片机控制电流闭环稳定输出 200mA, 测量信号经二级带通滤波器,通过阻抗与故障点之间的线性关系测量故障点 位置。

项目介绍:本系统为灵敏电流信号发生及测量装置——电流信号检测装置, 主要由功率放大器、电流传感器,电流检测电路组成。而电流检测电路由电流传 感模块、低噪放大模块、偏置电路、TM4C1294 控制模块组成。电流传感模块采 用非接触式测量,信号经低噪放大后同时输入到偏置电路与后级程控增益电路, 单片机控制模块通过比较程控增益放大电路的输出信号与设定值,输出增益控制信号 实现自动增益转换,使得单片机的输入信号能够稳定在所设置的最佳测量范围。在单片 机上利用 FFT 算法对信号进行频谱分析并在液晶上显示。





