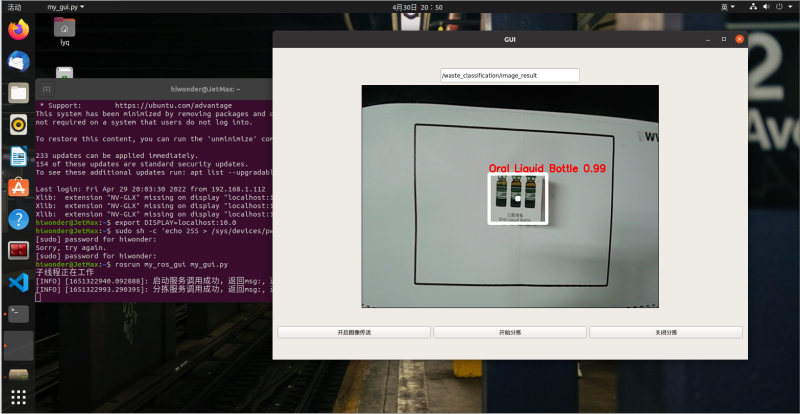
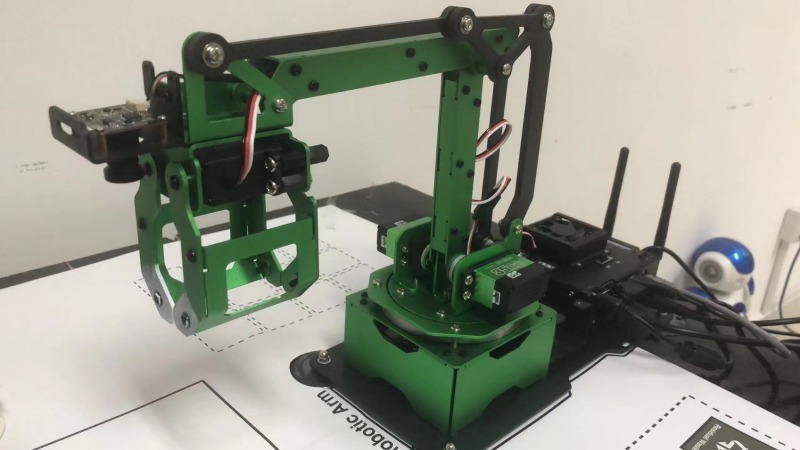
本设计根据首先进行了任务需求分析以及应用场景的设计,主要研究其在具体的应用场景下的垃圾分拣任务的实现。同时也根据任务需求制定了系统总体框架,并对系统中的各个硬件模块进行方案论证,然后主要对目标检测模型的设计与嵌入式端的部署进行了相关研究。利用相机手眼标定法的相关技术,建立了像素坐标系与世界坐标系之间的转换。在机械臂控制方面则建立了机械臂的结构模型,并对其进行了正逆运动学分析。针对相机采集的图像信息,先进行其尺寸大小上的预处理,以满足目标检测模型的输入尺寸要求,为了检测的更准确,在目标检测过程中进行了多次迭代处理,以减小因环境改变等外界因素对检测模型效果的影响。为了识别出物体的坐标,采用Anchor box的机制进行推测和判断。最后设计并实现了基于视觉引导的机械臂定位抓取系统,然后对该系统进行指定位置抓取实验和垃圾分类识别实验并对其进行论证分析。声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态










评论