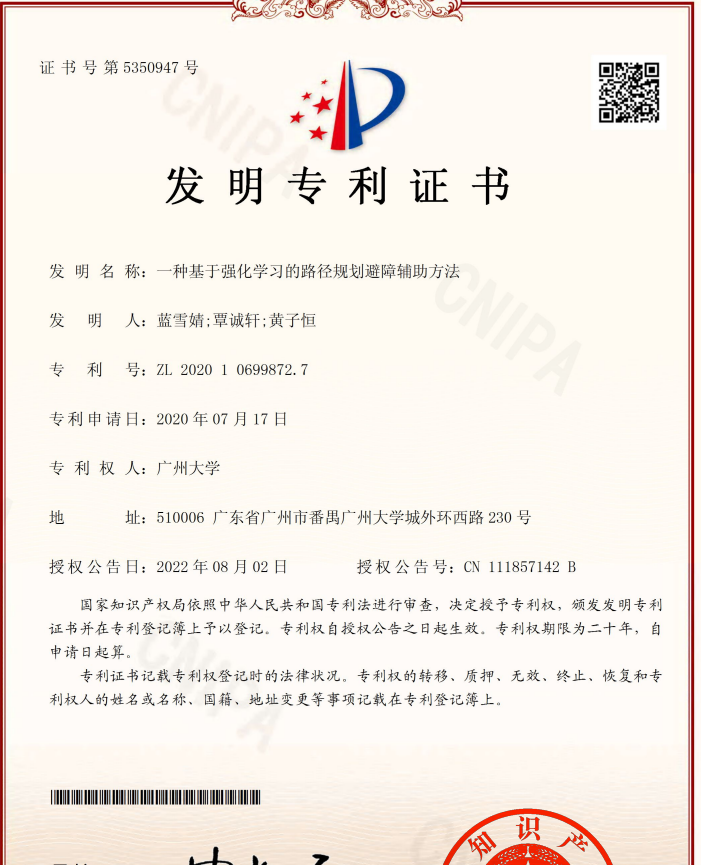
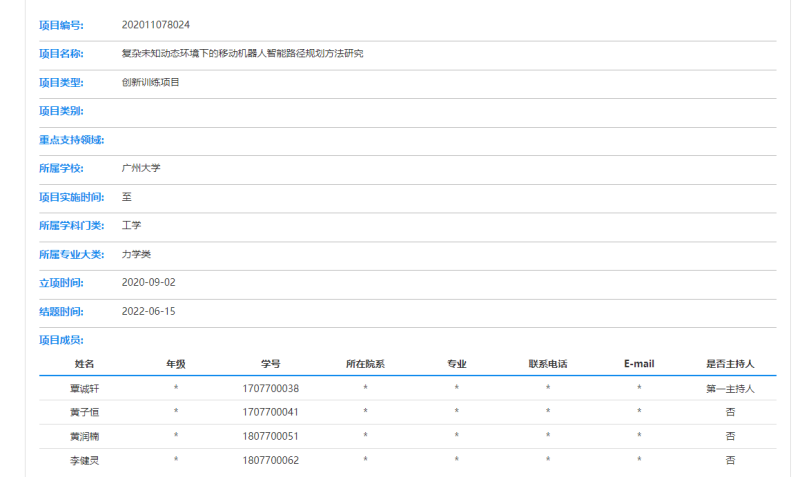
本项目拟研究的基于强化学习和神经网络的路径规划方案,是机器人或无人机在自主导航中的核心技术之一。和传统的人工势场法相比,它可以进行在线学习,具有面对复杂未知动态环境的能力,并且对传感器的要求较低,节约成本。本项目致力于解决机器人遇到大型障碍物时因陷入局部极值而产生振荡的问题,将全局路径规划和局部路径规划进行合理结合,研究局部振荡点检测及排除技术,以及通过仿真得到较优参数。声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态









评论