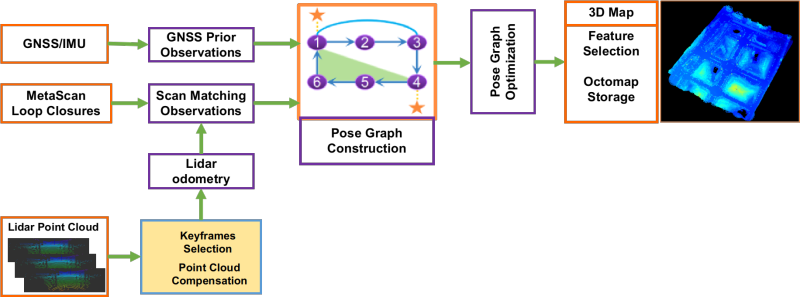
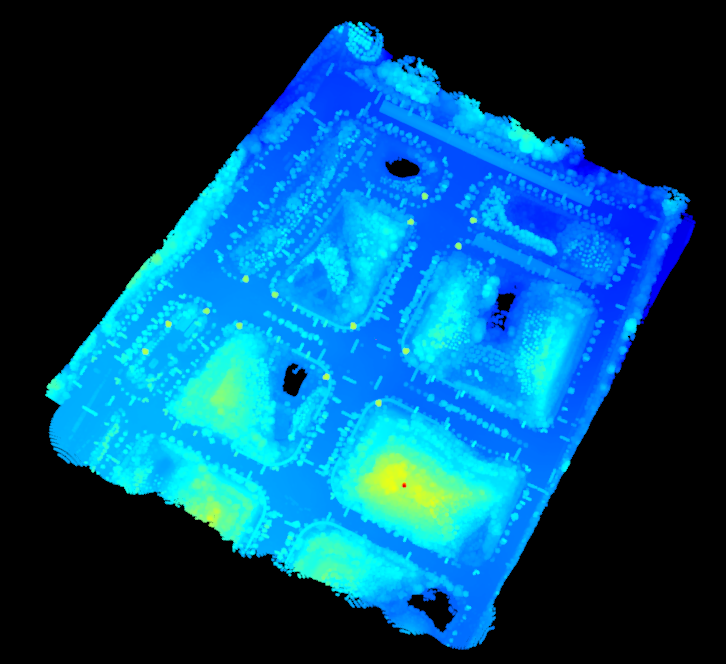
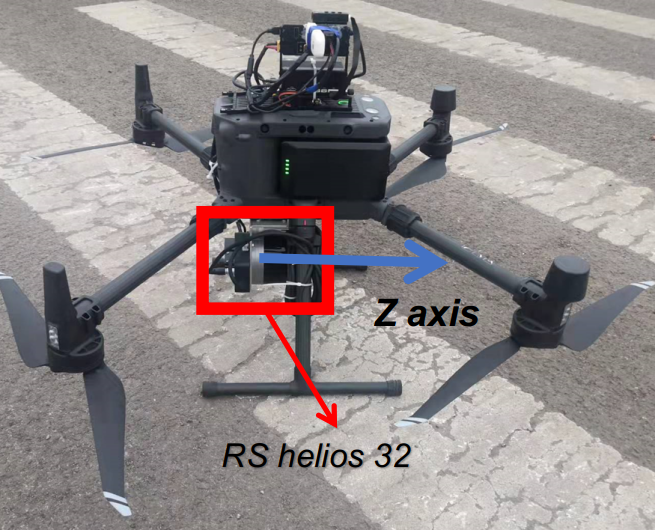
文章主要研究 GNSS 拒止环境下无人机的定位问题,应用 DJI M300RTK 搭载激光雷达进行离线高精度点云地图构建,再基于点云地图进行 GNSS 拒止环境定位。• 应用多帧融合形成 MetaScan 进行点云子图间的匹配,解决闭环关键帧点云数据量少的问题• 应用开源 LIOSAM 雷达惯性里程计,实现无人机 GNSS 拒止环境定位• 无人机局部子图与全局地图匹配时应用 LOAM,仅根据点到面的残差得到优化位姿提供匹配效果声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态









评论