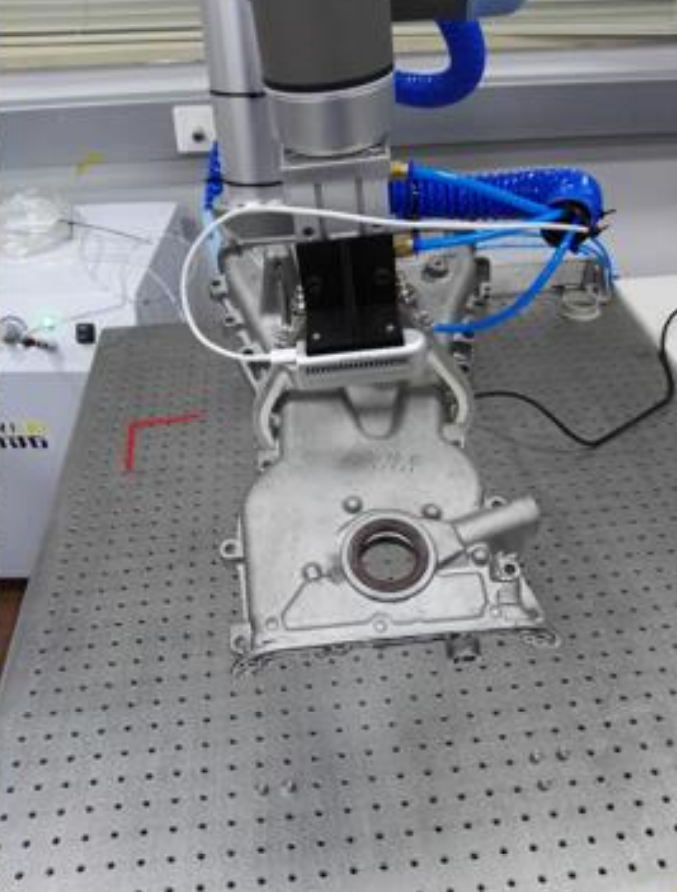
使用UR机器人加realsense实现对工作台面的实时三维重建和高精度抓取。原理就是在机械手带着realsense移动的过程中使用RGBD数据做slam计算出相机的位姿,并对场景进行三维重建,之后在三维点云中检索和匹配待抓取的物体,定位后驱动机械手去抓取。该方案成本低廉,可以做到1mm的定位误差。声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态










评论