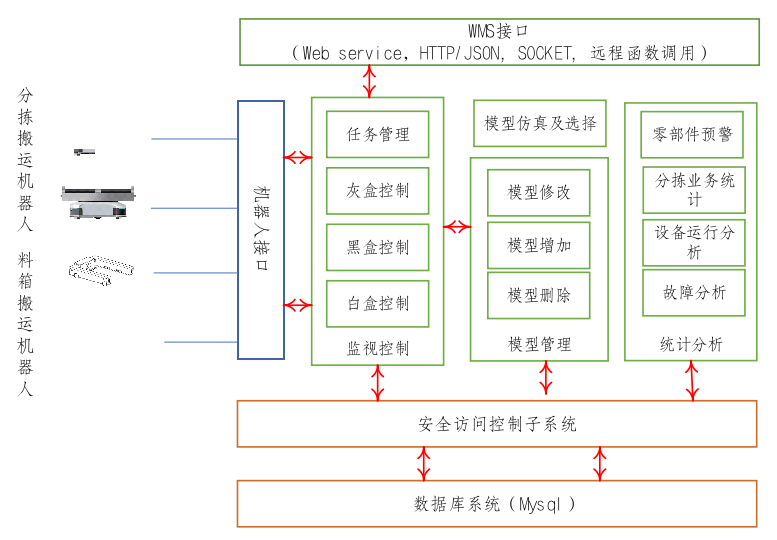
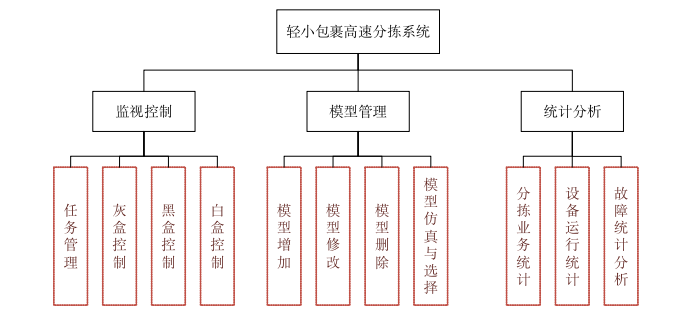
软件系统的整体结构采用分层设计、各层之间相互独立,之间只能通过数据接口进行交互。轻小包裹高速分拣系统在逻辑上可以分为采集层、通信层、业务层、安全保障层和数据层。采集层设备位于该系统的主要信息底层,实现对分拣搬运机器人和料箱搬运机器人等分拣设备的信息采集工作。通信层主要通过接口来接收上层WMS系统的订单分拣任务以及与分拣机器人等分拣设备进行通信,本模块设计提供多种形式的接口,包括:web service;http/json;socket以及直接的函数调用等。业务层描述了本系统提供的服务,如监视控制、分拣模型管理、模型仿真与选择和统计分析等。安全保障层描述了本系统所采用的安全措施,如用户授权和系统故障处理等。数据库层描述了系统所采用的数据库,负责存储分拣任务信息、故障信息、指令日志和机器人信息等系统运行数据。监视控制包括分拣任务的管理和分拣机器人的控制,对分拣机器人提供三种不同形式的控制:白盒控制、黑盒控制和灰盒控制。任务管理主要完成从WMS系统中接受订单分拣任务,并全程对分拣任务进行监视与控制,在系统完成分拣任务后,把分拣结果发送给WMS系统以及实时传送其他WMS系统需要的数据。白盒控制指通过机器人提供的最底层的控制指令来完成对机器人的接货、搬运、卸货等功能的控制模式。这种模式对机器人的控制最彻底,但系统中的机器人必须能提供底层的控制指令协议,本系统设计提供机器人抽象指令集来集成不同厂家不同型号的机器人集成协同。黑盒控制指把系统中的多台分拣机器人或者多台搬运机器人当成一个独立的执行单元来控制,本文的监控系统只需要把要执行的分拣任务发送给它,由它来控制完成接货、搬运、卸货等功能。这种模式对本系统的集成要求低,只需要对其提供分拣任务接口即可,但其实际效果受机器人生产厂家能力的限制。灰盒控制指本文的监控系统,可以对系统中的单个机器人分配分拣或者料箱搬运任务,任务具体的执行由独立的机器人个体自动完成,并将执行结果反馈给监控系统。这种模式需要本监控模块提供对机器人的任务指派接口。声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态


 2
2





评论