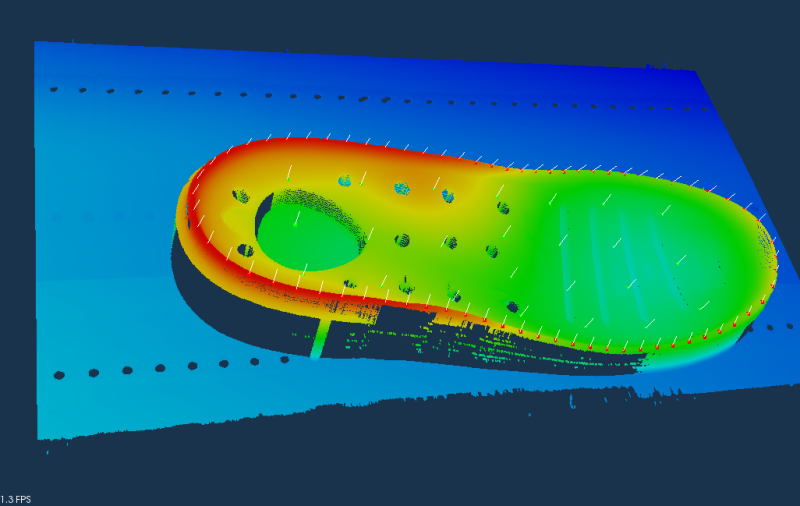
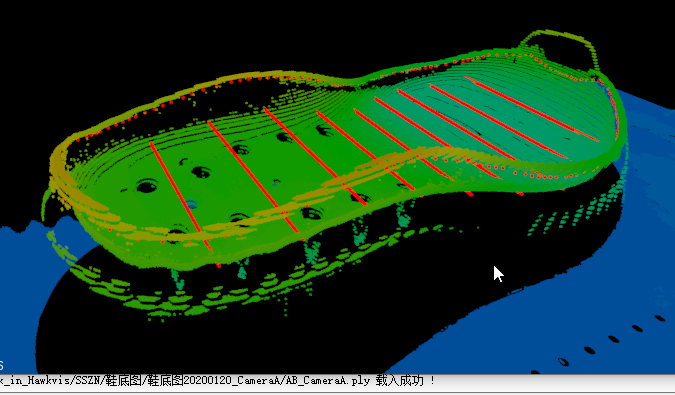
自动化涂胶机器人,可以自动识别不同型号,不同码数的鞋底,不受环境光的影响,对图像进行处理并利用强大的算法功能,准确提取出鞋底的信息。采用3D视觉可以有效识别出鞋底需要涂胶部分的三维结构模型,重新设置喷涂运动轨迹,机械臂就可以操控喷涂工具实现自动喷涂。步骤:1. 3D视觉相机安装在传送带上方,拍摄传送带上的鞋底的三维点云图像,获取鞋底曲面原始三维点云数据。然后将这些数据进行各种处理之后,就可以获得鞋底涂胶运动曲线。2. 涂胶机器臂放置传送带一侧,末端连接通讯好的机械手,并将胶枪安装在机械手上。智能机器人系统将结合内置算法计算可以获得涂胶轨迹曲线和涂胶位姿,引导机器臂进行精准涂胶。声明:本文仅代表作者观点,不代表本站立场。如果侵犯到您的合法权益,请联系我们删除侵权资源!如果遇到资源链接失效,请您通过评论或工单的方式通知管理员。未经允许,不得转载,本站所有资源文章禁止商业使用运营!

下载安装【程序员客栈】APP
实时对接需求、及时收发消息、丰富的开放项目需求、随时随地查看项目状态









评论