

C熟悉
0
1
2
3
4
5
我是程序员客栈的laopengyou,一名系统测试工程师,毕业于某211大学。现在在一家国产CPU公司上班。在大学中主要学习:C语言程序设计、面向对象程序设计(python)、51单片机、32单片机、数据结构、数电模电。
如果有一些开发环境、嵌入式开发、电脑信息等等基础问题欢迎来找我聊一聊。
2024-07-01 -至今西安兆芯系统测试工程师
在公司中主要对工作中遇到的不明确的内容进行信息搜集,checklist的建立,根据checklist进行测试。以及根据工作需要编写自动化脚本。
2019-09-01 - 2024-07-01石河子大学电子信息本科已认证

智能花盆模型 目录 一、作品背景 二、实现功能 三、RT-Thread使用情况概述 四、整体系统框架 五、硬件框架说明 六、软件框架说明 七、软件模块说明 一、作品背景: 随着人们生活质量的提高,经常在家中工作和学习的环境中放置一些盆栽花卉,既可以通过光合作用吸收二氧化碳,净化室内空气,又可以陶冶情操,让生活,工作,学习更加愉悦。智能花盆是智能家居的一种备受喜爱的一种新型家居设备,随着科技的发展,智能家居的概念频频出现在各大媒体上,进入公众的视线。本作品基于智能花盆的思路,设计了一种智能花盆设备的模型。 二、实现功能: 通过温湿度传感器进行温湿度采集,将采集到的数据通过串口发送温湿度到上位机,并利用wifi模块将温湿度上传到云端,在*端可以通过onenet云查看家中温湿度。 利用OLED屏幕实时显示温湿度,便于在家中查看。 如果温度过高,则电机(风扇)开启进行降温,湿度过低则,水泵开启为花卉浇水。 云端控制4种颜色led灯的开关,实现光源供应。 三、RT-Thread使用情况概述: 3.1 内核方面 使用了线程,*实现任务调度。具体创建了三个线程分别进行温度的检测与上传,湿度的检测与上传和OLED显示数据。 使用两个*,一个在"温度检测与上传"线程中用来传递温度值给"OLED显示数据"的线程,另一个在"湿度检测与上传"线程中用来传递湿度值给"OLED显示数据"的线程。 3.2 软件包方面 aht10传感器驱动库:实现AHT10驱动,在应用层调用测量温湿度。 u8g2不同种类单色屏驱动库:实现OLED驱动,在应用层调用显示温湿度。 cJSON: 超轻量级的 C 语言 json 解析库。 OneNET连接中国移动 OneNet 云的软件包:实现硬件连接云端,在应用层调用上传温湿度,以及下发命令控制硬件。 AT DEVICE:AT 组件在不同设备上的移植或示例。 WebClient(RT-Thread 官方开源的 http/https 协议客户端)。 3.3 设备驱动框架使用情况 pin设备驱动框架, IIC设备驱动框架 UART设备驱动框架, SPI设备驱动框架,
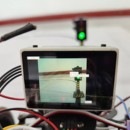
功能模块: 主车: 负责获取道路信息(红绿灯、斑马线、行人等),控制自身行驶路线和速度,并通过蓝牙与从车通信。 从车: 负责接收主车信息,并通过激光雷达感知主车位置,控制自身行驶路线和速度,实现跟随主车的功能。 视觉模块 (K210): 负责识别道路信息,包括红绿灯和斑马线,并将识别结果发送给主车。 通信模块 (HC-05蓝牙模块): 负责主车和从车之间的数据传输。 使用者功能: 主车: 可以在指定路线上自主行驶,并识别红绿灯和斑马线,进行停车或减速操作。 从车: 可以跟随主车行驶,保持一定距离,并安全地避开障碍物。 我的任务: 负责整个小车跟随行驶系统的设计和实现,包括硬件选型、电路设计、软件编程、算法实现等。 使用了STM32单片机作为控制核心,结合编码电机、红外寻迹传感器、超声波传感器、激光雷达、K210视觉模块等硬件设备,实现了小车的自主行驶和跟随功能。 采用PID算法实现了小车的速度控制和转向控制,并通过激光雷达数据实现了从车对主车的跟随控制。 技术栈: 硬件: STM32单片机、编码电机、红外寻迹传感器、超声波传感器、激光雷达、K210视觉模块、HC-05蓝牙模块等。 软件: C语言、PID算法、运动学逆解、yolov2目标检测算法等。 成果: 成功设计并实现了一套高效稳定的小车跟随行驶系统,能够实时获取前方车辆的行驶状态信息,进行智能调整,实现稳定可靠地跟随行驶。 系统通过了寻迹、速度控制、避障、视觉识别和交互等功能测试,验证了系统稳定可靠,基本实现了预期功能。 难点及解决方案: 寻迹精度: 通过修改舵机控制代码以及进入盲区时小车的状态,实现了小车顺利通过弯道。 视觉识别精度: 通过增大数据集以及增加负样本的数量和质量,并多次训练部署在K210的模型,最终可以较为稳定地识别红绿灯和斑马线。 从车跟随精度: 后续可以通过增加两车通信的方式尝试减小误差。





