

0
1
2
3
4
5

 ********
******** ********
********2023-03-15 -2023-05-31上海镌极特种设备有限公司移动机器人决策规划
基于Prescan+Carsim+simulink搭建了(EM planner)决策规划模型,结合LQR+双PID的控制模型,完成了基于Apollo框架的无人驾驶仿真
2022-11-28 -2023-02-28上海后摩智能科技有限公司规划控制算法实习生
调试L2物流小车,基于Apollo框架完成自动驾驶巡航、停障、绕障等场景的功能测试,实现了直线行驶速度达到10km/h,横向误差小于15cm,弯道行驶达到5km/h,横向误差小于40cm。 基于Carsim/Simulink实现控制模型,配置实车的相关信息并匹配测试实车自动驾驶模式时的路径信息
2021-09-10 - 2024-06-27四川大学计算机科学与技术硕士已认证
2017-09-10 - 2021-06-23四川大学计算机科学与技术本科已认证

在规划全局路径时考虑实际小车的物理体积,保证全局路径对于智能小车的实际可通行性 同时,通过剪枝对全局路径进行二次优化,减少路径中的拐点数量并缩短路径长度
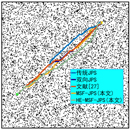
Matlab实现JPS算法的仿真和改进,并与其余的多种算法进行对比 JPS算法可以加快全局路径在空旷和复杂地图(障碍物覆盖率为2%和20%)中的寻路时间

涵盖全局路径规划(A*、JPS等)、局部路径规划算法(DWA、TEB等)、控制算法(LQR、MPC)实现麦轮小车的室内自主导航和避障 后续引入二次规划算法,对动态障碍物进行加减速避让,提升避障性能





