

0
1
2
3
4
5
0
1
2
3
4
5

 ********
******** ********
********我是ningboo,一名AI算法从业者,毕业于中国科学院大学计算机视觉专业。曾就职于多个互联网公司,担任数据分析师、Java WEB开发工程师、Clojure开发工程师、系统架构师、项目经理等多个职位。负责过PBX、教务系统、流程开发,以及多个计算机视觉项目,目前研究领域包括计算机视觉、LLM、强化学习等多个方向。熟练使用PyTorch,C++,Python,Java,Vue,数据库等AI、后端、前端技术栈。如果我能帮上您的忙,请点击“立即预约”或“发布需求”!
2021-09-01 -至今中国科学院自动化研究所学生
视觉目标检测算法开发,计算机视觉、激光雷达模态融合,进行目标检测定位。开发三维重建算法,实现物体在虚拟物体在虚拟世界的重建。
2020-02-01 -2021-07-01合肥天源迪科股份有限公司高级后端工程师
参与云网服务编排系统开发,负责Flowable流程平台系统封装,流程开发指导,流程平台使用指导。担任PBS电话交换系统项目经理和技术经理,系统采用springboot,vue2技术栈开发。
2019-07-01 -2020-02-01上海智隆信息技术有限公司高级后端工程师
参与教务系统重构,混合使用Java,Clojure进行系统选课,排课排考等功能开发。在项目中,担任工作流流程开发技术指导。
2016-07-01 -2019-06-01安徽科大国创云网科技有限公司开发工程师
参与河南联通OSS系统开发,河南电信智能分析系统开发,担人西藏移动统一支撑平台及西藏移动家宽系统开发。使用spring mvc技术栈
2021-09-01 - 2024-07-01中国科学院大学人工智能硕士
2012-09-01 - 2016-07-01河南科技大学材料科学与工程本科
材料成型及控制工程焊接方向,16年七月毕业
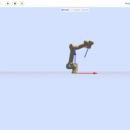
项目角色:负责项目中手眼标定任务、视觉感知算法、机械臂控制算法的研发与系统编码工作。 项目难点:待抓物体形态差异很大,如何精确识别待抓物体的姿态、获取良好的抓取控制参数以保证抓取的成功率。 技术方案:目前验证基于深度学习以及深度强化学习的方法,探索提升视觉感知的鲁棒性及姿态预测的高鲁棒性算法。
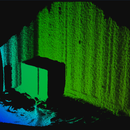
项目角色:负责开发并优化视觉算法,以实现角点的准确识别和货物的规范码垛。工作内容涵盖算法的设计、编码,确 保系统能够高效地与机械臂系统协同工作。 项目难点:集装箱的新旧程度不同,内部残缺修补状况各异,而且环境中存在灰尘干扰和复杂的环境光照条件。这些因 素增加了集装箱角点识别和码放规范性检测的难度,对视觉感知算法的鲁棒性提出很高的要求。 技术方案:使用 RGB-D 相机采集图像和点云数据,结合图像处理和深度学习算法,实现对集装箱角点和瓦楞箱体边缘 的检测。码放规范性检测方面,通过检测是否缺箱、少箱,是否存在歪倒、倾斜,判定码放的规范性。改进传统图像处理流 程,采用 MLSD 直线检测模型并在私有数据集上进行微调训练,提高检测的鲁棒性。

项目角色:负责项目的 90%工作。涵盖从硬件选型安装、算法系统架构设计开发,原型机识别精度验证的多个方面。 项目难点:同食材可能具有相似的外观和纹理,例如橘子和橙子;相同食材可能具有不同的外观纹理,例如各品牌的牛奶;食 材可能会被遮挡、密集摆放,而且包装不尽相同;算法需要部署在边缘计算单元上,因算力受限,需要优化算法以提高效率。 技术方案:采用目标检测、自研多目标跟踪技术。使用目标检测来识别人体和食材,自研多目标跟踪算法用于重建人手 和食材的运动轨迹,算法系统部署于 Jetson NX 边缘计算设备上,利用模型裁剪降低参数规模,以适应边缘计算环境。






