

0
1
2
3
4
5
0
1
2
3
4
5
 ********
******** ********
********2023-06-28 -至今中兴算法开发
做分布式数据库和分布式算法设计等。基于网络操作系统,做其中的分布式数据库和共享内存管理,开发和其中的算法设计开发
2022-07-01 -2022-11-01阿里巴巴算法工程师
阿里云神龙计算平台,部门是阿里云的核心部门,是阿里云计算大部门下做底层技术最深的部门。主要是用机器学习的方法基于海里数据做故障预测和性能受损检 测。内存不可纠正错误(UE)通常会导致宕机,而可纠正错误 (CE) 风暴可能影响性能甚至当时夯机。内存页隔离技术,目标是隔离故障页避免 更多的内存错误。目前在做阿里云云服务器的内存故障预测,对于一些节点的内存,依据一些特征和过去的内存错误统计对内存是否会发生异 常进行预测,对于大概率会发生异常的内存页做内存页隔离技术。
2022-01-01 -2022-05-01微软中国大数据实习生
云计算与人工智能实验室。Spark Connect library,在spark源码的基础上进行改进的一个工具库。可以提交并运行spark jobs到远程集群上面,可以连接远程的spark session并且可以step by step的debug code。在项目中主要负责开发支持工具类和支持一些Spark MLlib的学习任务的执行。例如支持远程 执行RDD算子逻辑,支持和服务端同步Jar包、class文件和broadcast变量等。负责设计开发一个测试框架,自动化测试Spark Connect libray的业务代码,使用Scalatest对test case进行包装,并且生成test case的报告。
2020-12-01 -2022-05-01字节跳动后台开发
所在部门是字节跳动的数据中台,负责给内部的大部分app提供数据支持。主要是对上线新的功能进行AB测试,并且通过AB测试后获取的数据 指标来决定是否上线新的功能。所在的小组是负责部分app的配置存储和配置下发。其他业务部门在平台上开启AB实验,并且同时配置AB实验 的对应参数,app通过分流和筛选获取之前存储的配置。主要做的是后端开发,app开启实验的参数配置管理,以及和实验平台的对接,使用 python的Django和restframework,还做了部分的数据库管理的工作。
2020-09-01 - 2023-06-01北京邮电大学计算机科学与技术硕士
成绩(Top 5% 本科 研究生 保送) 荣誉/奖项: 校级程序设计大赛金奖、数学竞赛二等奖、连续多年获得国家励志奖学金和校一等奖 参加校级程序设计大赛(ACM)并且取得竞赛金牌、招商银行FinTech精英训练营研发赛道决赛优胜奖、CCF基于BERT的大模型容量挑战赛决赛第四
2016-09-01 - 2020-06-01北京邮电计算机科学与技术本科
连续多年获得国家励志奖学金、校一等奖学金

具体工作是广告图片或广告文本的是否违法以及违反了具体哪条条例的判断(还有一些广告类型的判断)。例如输入一张广告图片,输出 图片里的广告文本,以及该广告是否违法,如果违法那么具体地违反了哪一条广告条例,以及在本地的广告图库中,哪一张图片和输入的 这一张图片最为相似。 使用了OCR提取图片文字,使用了Resnest-50、图片余弦相似度、Siamese network等处理图片相似度的问题,使用bert处理了广告文本分类的问题。
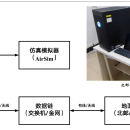
该项目是由军队装备部主办的第二届“无人争锋”挑战赛而来,项目是为参加挑战赛的科目三(目标跟踪集群围捕)。系统的需求是实现多个无人机的协同控制,多个无人机执行协同任务,发现场地内随机移动的目标车辆,并且对目标车辆进行跟踪和打击。 本人主要负责的是系统地设计与实现,以及部分的目标识别功能模块代码,和组员协作完成了系统整体框架的设计,包括通信接口、模块间的信息交互等设计、识别模块的识别模型设计、决策模块的算法设计,其中系统的主体框架是本人设计的。在设计的基础上完成了代码 的编写和调试工作,完成了多机的测试工作。 根据系统的需求,完成了系统的需求分析和模块划分,进行了流程设计和类图设计。并且做了30多页的PPT报告整个系统的设计过程。根据系统设计进行了系统的实现,最终完成了超过一万行代码地系统实现,并且通过无人机的多机协同飞行测试,多机协同跟踪目标的测试。
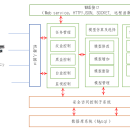
软件系统的整体结构采用分层设计、各层之间相互独立,之间只能通过数据接口进行交互。轻小包裹高速分拣系统在逻辑上可以分为采集层、通信层、业务层、安全保障层和数据层。采集层设备位于该系统的主要信息底层,实现对分拣搬运机器人和料箱搬运机器人等分拣设备的信息采集工作。通信层主要通过接口来接收上层WMS系统的订单分拣任务以及与分拣机器人等分拣设备进行通信,本模块设计提供多种形式的接口,包括:web service;http/json;socket以及直接的函数调用等。业务层描述了本系统提供的服务,如监视控制、分拣模型管理、模型仿真与选择和统计分析等。安全保障层描述了本系统所采用的安全措施,如用户授权和系统故障处理等。数据库层描述了系统所采用的数据库,负责存储分拣任务信息、故障信息、指令日志和机器人信息等系统运行数据。 监视控制包括分拣任务的管理和分拣机器人的控制,对分拣机器人提供三种不同形式的控制:白盒控制、黑盒控制和灰盒控制。 任务管理主要完成从WMS系统中接受订单分拣任务,并全程对分拣任务进行监视与控制,在系统完成分拣任务后,把分拣结果发送给WMS系统以及实时传送其他WMS系统需要的数据。 白盒控制指通过机器人提供的最底层的控制指令来完成对机器人的接货、搬运、卸货等功能的控制模式。这种模式对机器人的控制最彻底,但系统中的机器人必须能提供底层的控制指令协议,本系统设计提供机器人抽象指令集来集成不同厂家不同型号的机器人集成协同。 黑盒控制指把系统中的多台分拣机器人或者多台搬运机器人当成一个独立的执行单元来控制,本文的监控系统只需要把要执行的分拣任务发送给它,由它来控制完成接货、搬运、卸货等功能。这种模式对本系统的集成要求低,只需要对其提供分拣任务接口即可,但其实际效果受机器人生产厂家能力的限制。 灰盒控制指本文的监控系统,可以对系统中的单个机器人分配分拣或者料箱搬运任务,任务具体的执行由独立的机器人个体自动完成,并将执行结果反馈给监控系统。这种模式需要本监控模块提供对机器人的任务指派接口。





