深度学习
机器学习
图像处理
图像识别
Torch
0
1
2
3
4
5
0
1
2
3
4
5
 ********
******** ********
********2022-11-01 -2023-01-01杭州凌像科技有限公司图像识别实习生
参与工业图像中的圆检测项目,负责论文复现,使用如傅立叶变换,图像均衡化,lsd检测等代码实现;实现深度学习识别模型,风格迁移模型设计等工作。
2021-07-01 -2021-08-01浙江大学湖州研究院算法实习生
负责农机基于python的轨迹数据处理,轨迹可视化,基于pytorch的转弯提取MLP模型设计,转弯分类LSTM模型设计,CNN模型设计等工作。
2019-09-01 - 浙江大学农业工程本科
专业排名2/61,曾获浙江大学一等奖学金,浙江省政府奖学金等,目前保送浙江大学研究生。
通过jetson nano作为上位机,arduino作为下位机,控制四轴机械臂根据目标识别和测距结果运动,打到运动目标执行操作的程序软件。
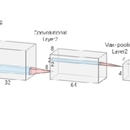
包括gps轨迹转弯提取模型,和转弯分类模型。前者通过mlp实现,能够提取gps轨迹中的转弯部分,后者通过cnn和lstm实现,能够对转弯序列或图像进行分类。