

图像处理
0
1
2
3
4
5

 ********
******** ********
********我是程序员客栈的【小小玉儿】,一名【小张】; 我毕业于【复旦大学】,担任过【中国科学技术大学】的【实验室助理】; 负责过【三维点云SLAM】,【无人驾驶感知系统】,【图像处理】的开发; 熟练使用【图像处理】,【语音处理】,【人工智能算法】; 如果我能帮上您的忙,请点击“立即预约”或“发布需求”!
2011-09-01 -至今中国科技大学科研助理
在合肥的中国科学技术大学信息学院担任语音图像处理实验室科研助理,精通多种人工智能技术。
2008-05-09 - 2011-07-01复旦大学检测技术与自动化装置硕士
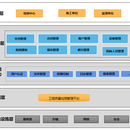
遵循面向服务架构(SOA)的设计原则,采用符合J2EE规范的Web计算模式,以面向服务的体系架构设计思想,采用多层的分布式体系结构进行构建。在设计模式方面采用目前主流的“轻量级”设计思想,构建稳定、高效、可扩展、可管理的软件系统。系统采用目前应用广泛的 Browse/Server 架构,配置简单、使用方便、升级灵活。

惯性导航系统(Inertial Navigation System,INS)无需额外的信号源,其可通过内部的惯性测量单元(Inertial Measurement Unit,IMU)来敏感载体的运动信息,在此基础上利用惯性导航算法即可为用户提供连续的位置、速度和姿态信息。INS 的优势在于:不受外界干扰、短时导航精度高、数据更新频率快、能提供全面的导航信息,这些优势使其被广泛应用于导弹制导、航空航天、倾斜测量等。但 INS 也存在其缺陷,IMU 测量信息中含有元器件误差,而 INS 导航算法就是积分 IMU 测量信息,这会导致 INS 导航误差会随时间的累积而迅速累积,因此 INS 无法提供长时间的高精度导航信息,尤其是低成本的微机电系统(Micro-Electro-Mechanical System,MEMS)级别的 IMU,其导航误差累积更为严重。尽管通过误差标定与补偿技术可以有效地减弱 IMU 元器件误差对INS 导航结果的影响,但一些IMU元器件误差是随时间和温度的变化而改变的,在没有外界信息辅助的情况下,时变和温变部分的误差无法准确估计和补偿。

大规模三维场景重建平台是一种崭新的三维空间数据采集与重建方法。相对于二维影像,三维点云具有精度高、密度大、信息丰富等优势,已成为国内外地理信息产业、城市规划、环境监测等各种社会领域不可或缺的重要空间参考数据。本平台提供全自动大规模三维场景重建功能,覆盖了从点云前期处理(如浏览、分区、编辑、坐标系转换)、到点云分类(地形、道路、植被、人造物体等)、特征(点、线、面、自定义)提取、直至最终三维场景创建的全部数据流程。本平台涉及一整套关键技术,如金字塔式空间数据库、基于语义的特征识别、全自动化影像校准及纹理映射等,极大地提高了重建效率。针对于大场景三维重建的验证表明,基于本平台的三维场景重建流程与手工制作流程相比平均可缩短45%的建模时间以及75%的纹理映射时间,并可达到与手工制作技术相媲美的场景效果。




