## 机器人手持示教器
### 功能模块
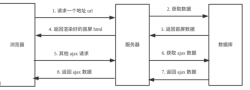
1. 通信处理模块
1. 基于modbus RTU 修改的变体协议,满足上下位机通信。主要通信内容为客户编辑的程序,设定的参数和按键指令。
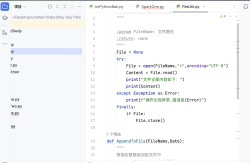
2. 数据存储接口模块
1. 系统基于sqlite作为存储数据库
2. 提供程序和参数存储,备份和还原接口
3. 报警记录和操作记录存储
3. 程序指令编译模块
1. 将JSON格式的程序指令输出为HMI可以使用的内容
2. 将JSON格式的程序指令输出为下位机控制器支持的格式
3. 程序规范性检查
4. 人机界面模块
1. 利用QML实现
2. 提供项目内常见的人机交互控件
3. 报警信息显示
4. 操作记录显示
5. Linux 操作系统
1. 提供定制的驱动程序
2. 提供生产和重装的U盘启动脚本
3. 裁剪后的文件系统
### 负责的内容
1. 整体程序框架设计
2. 基础的交互控件库设计
3. 程序编译器设计
4. Linux内核裁剪优化,驱动程序实现。包括屏幕驱动,触摸驱动,按