

0
1
2
3
4
5
0
1
2
3
4
5

 ********
******** ********
********1.熟练掌握C/C++,Python编程语言,熟悉STL库内的算法及容器。具备丰富的软件开发经验,能够熟练运用这些语言进行高效编程。
2.掌握树莓派,STM32和C51单片机的开发与应用,具备基于STM32进行嵌入式系统开发的能力。
3.熟悉ROS机器人操作系统,具备在Ubuntu系统下进行ROS机器人开发与调试的实践经验。
4.熟练掌握Matlab、Keil、Pycharm、CAD、Visual Studio、altium designer等软件的操作及代码编写。
5.熟练使用Ubuntu操作系统,对Linux系统环境有深入理解,能够在Linux系统下进行高效的开发工作。
6.具备SLAM(Simultaneous Localization and Mapping)技术应用经验,参与过相关项目的研发,对路径规划和SLAM建图有深入理解和实践。
7.在校期间积极参与科研项目,成功发表了多篇专利,表现出强烈的学术研究能力和创新精神。
8.本人拥有较强的吃苦耐劳精神,在校期间没有过任何违规违纪的记录,同时与同学们都保持着良好的友谊关系,并且拥有着较强的学习能力,能够在短时间熟练掌握某一软件,且热爱编程。
2024-07-17 -至今暂无后端
熟练掌握C/C++,Python编程语言,熟悉STL库内的算法及容器。具备丰富的软件开发经验,能够熟练运用这些语言进行高效编程。掌握树莓派,STM32和C51单片机的开发与应用,具备基于STM32进行嵌入式系统开发的能力
2022-09-01 - 淮阴工学院自动化硕士
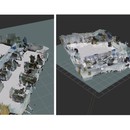
基于树莓派4b的和stm32单片机的Ros小车,通过深度摄像头实现室内场景建立稠密点云图,同时结合2D激光建图实现大范围快速建图。并通过全局路径规划算法A*算法,以及TEB与DWA的融合算法作为车辆的局部路径规划算法,实现车辆的路径规划。项目中我主要ubuntu操作系统,使用visual studio code对C++代码以及launch文件进行编写以及调试,同时在调试过程中,对BUG代码进行修改,包括CMakeLists文本中不兼容及缺失部分的代码修改,本次项目是基于Ros系统进行小车的设计。




