

0
1
2
3
4
5
0
1
2
3
4
5
 ********
******** ********
********2022-06-12 -至今苏州天准科技运动控制算法工程师
主要负责轨迹算法开发,运动控制性能分析,matlab机台数据分析及建模,等等。。。
2021-02-20 -2022-06-05深圳墨影科技机械臂算法工程师
负责机械臂算法开发,人机交互,机器人的tcpip开发,python,matlab
2018-09-09 - 2021-02-01韩国建国大学动力学及控制硕士
主要研究机械臂的阻抗控制及控制算法
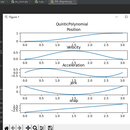
项目中云用到了FOC控制,需要FOC相关的svgen的一些算法模块,及pid控制算法,到电机轨迹曲线。底层的pwm波等开发不是我负责,我主要负责,foc算法模块和轨迹算法及pid控制算法的开发及调试。最终使得电机能闭环运转
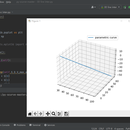
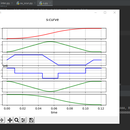
项目中的FOC控制环路,svgen模块以及一些FOC相关的算法模块,pid等控制算法的调试,最终结果通过FOC控制,输出pwm,到电机的正反转,设计到的轨迹算法。 在三坐标的项目中开发的空间圆弧,直线等插补算法。机械臂的上层控制算法等。




