

机器视觉
算法设计
0
1
2
3
4
5
0
1
2
3
4
5

 ********
******** ********
********我是程序猿客栈的Jimmyn,方向是自动驾驶方面的工作;
• 具备良好的数学理论基础,熟悉高等工程数学,线性代数与概率统计等数学理论
• 具备扎实的编程能力,熟悉应用 C++11,STL,PCL,Eigen,OpenCV, 以及 Ceres,gtsam 等优化库
• 熟悉 LOAM,LEGO LOAM, LIOSAM 等雷达里程计,熟悉 ICP,NDT,LOAM 等点云匹配算法
• 熟练无人车硬件平台, ROS 与 QtCreator 等软件平台,及 LiDAR,Camera,IMU 等传感器配置和应用
• 了解 Docker, Git, Tmux 等基本使用以及 Dockerfile, Shell 等编写
2022-05-01 -2022-07-01momenta系统研发组
主要参与 HNP-CT, Offline Verification Platform 的研发工作,从 CLA 云端服务器下载数据集进行模块测试,基础功能测试与场景功能测试,其中模块测试包括 Localization, Camera_Detection 及 FusionTracking Perception 的部分,形成最终的测试报告上传至 CLA 云端服务器。 • 部署离线仿真环境,算法 docker 和 OVP(仿真平台) 镜像模块服务器部署 • 学习 momenta 基础开发流程与框架库,了解 HighWay 定位算法模块程序及 OVP 定位评测程序 • 了解相关 msg 和对应消息内容,实现目标感知的 object_match_global 的 python 程序,对相机感知与融合感知的结果进行测评
2020-09-01 - 2023-03-01国防科技大学控制科学与工程硕士
自动驾驶实验室 课题与项目方向为自动驾驶高精度地图构建与定位 具备扎实的编程能力,熟悉应用 C++11,STL,PCL,Eigen,OpenCV, 以及 Ceres,gtsam 等优化库 熟悉 LOAM,LEGO LOAM, LIOSAM 等雷达里程计,无人车硬件平台,
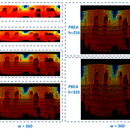
文章对三维激光雷达点云如何产生 RangeImage 图像的两种方式 PBID(RangeImage 行由雷达点云的线束决定), PBEA(RangeImage 行由点云的俯仰角决定),在 Kitti 数据集及 Ruby128 和 Padar128 的实验数据进行分析比较,实验结果最终表明 PBEA 的量化误差更小,更加适用于三维环境建模的任务。 • 不同类型的雷达,其线束的仰角不同,因此为得更通用的 RangeImage, PBEA 的方法更加适用 • PBEA 方法将 RangeImage 的高宽增大,会使得转化的量化误差非常小,优于 PBID 的方法,例如 velodyneHDL64 设为 128 行, Pandar128 或 Ruby128 设置为 384 行
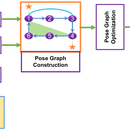
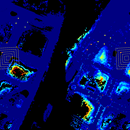
文章主要研究 GNSS 拒止环境下无人机的定位问题,应用 DJI M300RTK 搭载激光雷达进行离线高精 度点云地图构建,再基于点云地图进行 GNSS 拒止环境定位。 • 应用多帧融合形成 MetaScan 进行点云子图间的匹配,解决闭环关键帧点云数据量少的问题 • 应用开源 LIOSAM 雷达惯性里程计,实现无人机 GNSS 拒止环境定位 • 无人机局部子图与全局地图匹配时应用 LOAM,仅根据点到面的残差得到优化位姿提供匹配效果
在自研的智能车上部署激光雷达,惯导与相机等多种传感器,实现智能车从 A 到 B 的自主导航功能 • 设计四轮驱动智能车由期望线速度与角速度分配到四轮轮速量的算法,使智能车运动更加平滑 • VelodyneHDL32 雷达与 MTI300 AHRS 惯导部署到智能车,获取点云与惯导数据, ROS 消息发出 • 应用 Cartographer 进行实验车库环境的二维离线建图,基于此离线地图用 Cartographer在线定位 • 应用 move_base 功能包进行智能车全局与局部路径规划实现导航功能





