熟练使用C/C++、Python开发语言,熟悉Linux操作系统开发;熟悉OpenCV图像处理库,与广度优先等相关算法; 熟悉 SQL和oracle结构化查询语言; 熟悉基于激光雷达的SLAM相关技术领域知识; 熟悉TCP/IP网络协议基础并具备网络编程项目经验; 熟悉HTTP协议,以及Websocket长连接通信; 熟悉多进程编程; 掌握共享内存通信; 掌握ZMQ发布发布订阅模式; 熟悉多线程管道等通信,掌握同步阻塞,同步非阻塞等四种IO模型; 熟悉Protobuf结构化数据存储方式,熟练JSON数据的封装与解析;
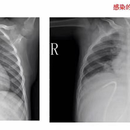
通过模型的训练,分类出正常的肺部图与感染的肺部图,加载预训练模型ResNeT,冻结预训练模型中低层卷积层的参数(权重),在训练集上训练分类层。
 0
02023-03-29 15:46
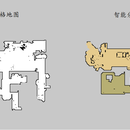
将雷达实时构建的室内概率地图的障碍物以及墙体进行细化与拉直处理,已达到地图美化的相关效果,是基于 Opencv 的后端图像
算法。
0 2023-03-29 15:33
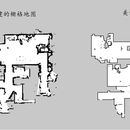
一种室内区域自动划分算法,采用形态学图像处理技术对 SLAM 扫描的初始地图进行区域
划分,得到所述室内区域图像的至少一个房间区域。
0 2023-03-29 15:25



 ********
******** ********
********





