首页
程序员
解决方案
招聘用人
云端工作
自由工作、远程工作
项目研发
需求梳理
规划落地您的想法
整包开发
一站式软件开发
作品
发布需求
开发者入驻
APP
登录
/
注册
技术
全部
Python
Java
PHP
C
C++
Android
iOS
Go
Rust
Ruby
Swift
Vue
JavaScript
MySQL
CSS
小程序
Redis
SpringCloud
C#
uniapp
更多
行业
全部
人工智能
企业服务
区块链
物联网
云计算
VR/AR
金融
旅游
物流仓储
社交
医疗健康
在线教育
更多
其他
类型
全部
全部
开源项目
产品系统
源文件源码
语言框架
系统
全部
全部
web
Web3
脚本插件
嵌入式硬件
车载应用
电视应用
开源软件
算法模型
云服务
iPadOS
Linux
MacOS
Windows
IOS应用
Android应用
HarmonyOS
小程序轻应用
H5
全部
C++
C++既可以进行C语言的过程化程序设计,又可以进行以抽象数据类型为特点的基于对象的程序设计,还可以进行以继承和多态为特点的面向对象的程序设计。C++擅长面向对象程序设计的同时,还可以进行基于过程的程序设计。
打印机驱动程序(Windows)
基于Microsoft Mini Printer Driver架构编写的打印机驱动程序,支持指令定制、打印机名称定制、纸张样式列表等功能。 免费提供应用前面、驱动签名等服务,如需定制签名内容,也可以协助。
213
0
C/C++
c++
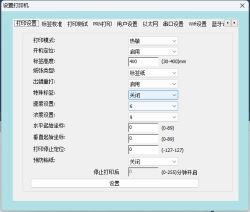
打印机设置工具(C++)
1、打印机设置工具,支持多种连接方式,支持下载程序和字库。 2、支持以太网、串口、WiFi、蓝牙设置 3、定制工具,支持功能拓展和通信协议适配
185
0
C/C++
c++
图片显示器
一个图片查看器一样的功能,将主窗口显示图像,可以用鼠标拖拽和滚轮缩放,图片放大到超出窗口大小时,主窗口显示滚动条,同时导航窗口显示一个红色矩形框,表示主窗口显示的部分在整个图像中的位置,可导入新的图片查看。
142
0
C/C++
Qt
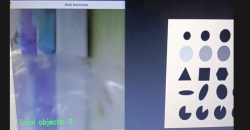
BLOB盲人引导系统开发成果
盲人引导手杖引导系统,自动识别周围环境障碍,并发出提醒警告,持续报警声:位于手柄部位,有独立开关,按键输出95分贝以上的报警声,可起警报器作用。 警示闪光灯:位于手柄部位,有独立开关,9个红色发光二极管,按键后强红光闪烁,200米可见,起警示作用。
103
0
C/C++
python
期货量化交易系统
简介:实现6个子系统 1.行情图形化 2.数据可视化 3.交易策略执行 4.冗余系统的设计开发。【技术路线不同,设计不同】
167
0
rocketmq
java
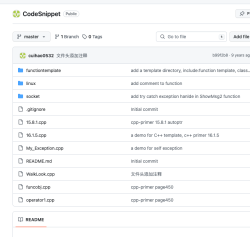
各类socket模型实现
开源项目
windows平台上实现的包含IO完成端口在内的各类socket模型实现。 用户可以基于此代码进行修改来实现自己的socket服务。
299
0
C/C++
windows
windows桌面时钟屏保
开源项目
一个桌面时钟软件,类似fliqlo,支持配置是否显示秒、是否显示日期(开发中) 1、基于QT、C++、WIN32 API实现 2、设置的时间内无键盘鼠标输入弹出屏保 3、该软件可以改造为windows屏保软件 4、支持多显示器
486
0
C/C++
windows
桌面下载工具软件
开源项目
windows平台下载工具软件,模仿IDM,短期目标是win平替,远期目标是全PC平台并商业化,目前开发中。 1、基于QT5和纯C++实现(暂时没有用到平台api,开发中未完成) 2、UI中的菜单、文字、图片均由配置文件实现,可以灵活修改 3、支持多国语言,也可以通过明文配置实现
347
0
C/C++
windows
循迹智能车
软件工程师 | 上海泰辑科技有限公司 2022.1 – 2022.7 1:16 项目的上层应用开发 2:电子表盘的 UI 制作 3:对接蓝牙协议 4:编写智能手表对语言翻译切换功能 5:软件功能开发
163
0
C/C++
c++
移动机器人远程操控系统
项目中我一个人负责设计和实现了从电位器的信号采集,AD转化,数字信号转化为通信协议,Socket通信到服务器。 最后4G模块把数据传输到了移动机器人上面,以最终实现移动机器人的远程操控。
170
0
C/C++
终端服务器/远程连接
驾驶员自助体检系统
1. 作为项目经理负责整体产品的规划,设计(包括硬件设计和选型),开发方面是设备端开发的主要人员;团队4人。 2.负责 C/C++核心代码编写底层库,通过RS232,485连接串口控制声波(检测身高),体重检测,步进马达(控制伺服器驱动 单反相机达合适高度并拍照);USB接口控制单反相机;通过USB读取二代身份证信息;网口控制网络相机,采用OPENCV图 像进行分析(对头部坐姿高度,手部五指是否符合驾驶员要求进行检测,人脸识别和比对)。界面UI采用QT,调用C/C++底层 库实现具体功能;端设备通过HTTPS协议与后端JAVA服务器进行交互。 3. 负责系统整体架构设计和硬件设备选型,配合工厂车间进行设备调试。 4. 系统采用JAVA+C/C++(底层+设备控制+QT)。
150
0
C/C++
c++
基于WIN\LINUX跨平台应用软件开发
软件支持COM,wifi,rs485,CAN多种通信方式,且可以跨平台应用,内部增加力控算法、力控策略以及动态高速数据处理
96
0
C/C++
c++
物联网软件平台;手指点读;
1. 曾做过物联网软件平台中关于空间联动相关算法库的研发工作; 2. 曾做过基于深度学习的手指点读项目; 3. C++项目:电子凹印机误差检测及拼版软件 在雕刻凹版印刷机中需要对印刷品质量进行监控,利用印刷滚筒印刷时自动抓拍的波形图像对印刷 样本进行质量评估和误差检测。软件同时集成印刷样本自动拼版和相关图像格式转换功能。 本人在该项目中开发误差检测算法的后端实现以及在Windows上的Qt桌面应用程序。
137
0
C/C++
c++
PLM Teamcenter项目
基于Teamcenter的项目管理的项目团队成员管理,资源管理、交付物管理、流程管理 PDM PLM图文档 BOM管理 ERP/MES/SRM等系统集成管理 丰富的系统实施、系统架构、DB、PLM二次开发、接口开发经验
135
0
C/C++
PLM
运动相机(SportDV) 手机端 Android APP
运动相机类似于GoPro, 采用公司自研芯片平台,基于嵌入式Linux系统。提供硬件及软件设计解决方案。 手机端的Android APP能与相机建立P2P连接,进行图像/视频观看及各种操作。 主要负责界面及部分功能的实现,完成的功能有: 1.同相机建立连接; 2.实时预览视频; 3.抓拍/连拍/录像功能,并以列表形式显示文件; 4.在线浏览,文件保存; 5.参数设置
200
0
音视频
APP
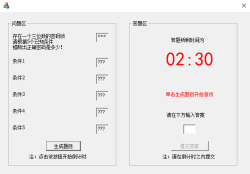
密码锁小游戏
1.此项目分为UI模块和业务模块。功能实现:玩家每次开始游戏时,会随机生成一个三位数的密码,有五个条件,玩家可通过这五个条件判断密码是什么,生成密码后会有倒计时限制,如果超时或没有正确提交答案,则当玩家失败。只要在限定时间内提交了正确的答案,就算成功 2.①先用开发工具VS2019的资源视图调整窗体控件和布局 ②编写好每个控件对应的回调事件 ③实现后台计时功能 ④实现密码随机生成 ⑤根据密码按照一定的规则生成五个条件,确保玩家能根据这些条件猜出密码
345
0
C/C++
c++
驾驶员监控系统
驾驶员监控系统通过一个面向驾驶员的红外摄像头来实时监测头部、眼部、面部、手部 等细节,可以从眼睛闭合、眨眼、凝视方向、打哈欠和头部运动等检测驾驶员状态。通常通 过检测人脸眼睛和其他脸部特征以及行为,同时跟踪变化,实现驾驶员疲劳、分神、不规范 驾驶检测。从而及时提醒驾驶员达到安全驾驶的目的。 1. 使用OpenGL ES共享上下文双线程渲染技术。主渲染线程负责视频渲染和绘制, 在主线程之外通过共享EGLContext的方式开辟新的离屏渲染线程,将主渲染线程Camera生成 的纹理、VBO等资源共享,同时利用Fence机制完成GPU命令同步,实现数据流的实时获取。 2. 模型按需加载,降低内存占用。使用MNN框架完成YoloV5目标检测、分类等模型在CPU 的推理,利用CPU多线程加速。 3. 在移动设备上使用轻量级模型。部分网络使用MobileNet进行训练,利用Depthwise有效 减少模型的参数和运算量,降低推理时延。 4. 使用TensorflowLite在移动端推理
236
0
C/C++
android
MD5编码小工具
本小工具实现了一个简单的MD5编码小功能,结果可以大小写转换。使用的是C++语言,调用Windows API实现。 本作品为学习C++编程的一个练习。
165
0
C/C++
c++
Android平台Audio机能开发
熟悉Android平台Framework层,JNI层,HAL层开发 熟悉Android平台Audio机能开发 熟悉C C++ Java等编程语言 熟悉Android,linux等平台软件开发,编译,调试 8年软件开发经验
127
0
C/C++
android
数码大方 标准产品业务
一些标准产品业务,主要包含关于在客户端界面的结构识别,展示,以及装配关系的提取和轻量化工程图的输出和签名 个人主要在其中负责处理从图纸结构到便于保存在数据库中的关系之间的匹配和数据结构的设计 个人在数码大方的一年中两次在季度奖中获得组内第一
119
0
C/C++
c++
当前共202个项目
1
2
3
4
5
6
7
8
9
10
...
登录
登录后即可上传、下载作品
分类
Python开发工具
物联网
汇编
VBScript
crm
教程与指南
WPF
Android
常用JavaScript包
服务器端JavaScript
×
寻找源码
源码描述
联系方式
提交
重点城市程序员兼职推荐
北京程序员兼职
上海程序员兼职
深圳程序员兼职
杭州程序员兼职
广州程序员兼职
成都程序员兼职
南京程序员兼职
武汉程序员兼职
西安程序员兼职
重庆程序员兼职
郑州程序员兼职
长沙程序员兼职
苏州程序员兼职
合肥程序员兼职
厦门程序员兼职
济南 程序员兼职
青岛程序员兼职
天津程序员兼职
大连程序员兼职
福州程序员兼职
石家庄程序员兼职
沈阳程序员兼职
太原程序员兼职
无锡程序员兼职
南昌程序员兼职
哈尔滨程序员兼职
南宁程序员兼职
珠海程序员兼职
宁波程序员兼职
昆明程序员兼职
东莞程序员兼职
贵阳程序员兼职
美国程序员兼职
长春程序员兼职
温州程序员兼职
佛山程序员兼职
常州程序员兼职
呼和浩特程序员兼职
兰州程序员兼职
乌鲁木齐程序员兼职
中山程序员兼职
海口程序员兼职
洛阳程序员兼职
更多
重点岗位程序员兼职推荐
C++兼职
Rust兼职
小程序兼职
cocos2d-x兼职
Unity3D兼职
DBA兼职
运维兼职
测试兼职
移动其他兼职
Go兼职
UE设计师兼职
全栈兼职
技术创始人兼职
CTO兼职
项目经理兼职
产品经理兼职
原画师兼职
UI设计师兼职
前端兼职
iOS兼职
Android兼职
Node.js兼职
Ruby兼职
架构师兼职
Python兼职
C#兼职
C兼职
PHP兼职
Java兼职
鸿蒙兼职
区块链兼职
人工智能兼职
硬件开发兼职
更多
您好 👋
我们能提供什么帮助?
向我们发送消息
常见问题、使用帮助、人工咨询等
智能搜索
手机访问
使用微信扫一扫