


图像处理
0
1
2
3
4
5
0
1
2
3
4
5
 ********
******** ********
********我是程序员客栈的SugarYou,一名视觉算法工程师; 我毕业于同济大学,担任过知名车企的视觉算法工程师; 负责过车端数据监控平台,视觉算法后端的开发; 熟练使用Python,C++等语言; 如果我能帮上您的忙,请点击“立即预约”或“发布需求”!
2019-06-01 -2020-06-01上海翌视技术有限公司视觉算法工程师
主要负责线激光传感器算法开发, 完成了视觉检测线激光以及恢复扫描物体三维形状等算法,精度达到毫米级别
2014-09-01 - 2017-06-01同济大学机械设计及理论硕士
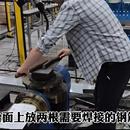
1.项目主要分为:(1)3D相机与机械臂标定; (2)3D相机识别刚接半径及位置;(3)将钢筋位置发送给机械臂 2. 我主要负责3D相机与机械臂标定算法,以及3D相机识别钢筋位置。 3. 难点主要是3D相机与机械臂标定的精度要达到1mm以内,3D相机需要精确识别钢筋的位置。

1. 项目分为:相机自动识别棋盘和棋子算法;AI自动计算下一步最优位置;发送给机械臂位置信息;让机械臂执行下棋的动作 2. 我在项目中负责了相机自动识别棋盘和棋子算法,发送给后端,让AI自动计算下一步最优位置,将结果发送给机械臂。 3. 难点在于需要识别人放置棋子的位置,同时也要识别是否有人在下棋,确认人下好棋子后才能检测棋盘,需要精确识别棋子位置。需要熟悉机械臂通讯协议,将落子位置发送给机械臂。

1. 项目主要是针对市场上所有车上传到云端的数据,根据数据获取车上传感器位置信息,通过位置信息去计算波动,从而分析车辆状态,例如是否有碰撞等 2. 我负责了使用Python获取批量云端数据,后台处理云端数据并画出图像,并分析数据的一个波动,给出一些结论。 3. 难点在于(1)如何稳定获取大批量云端的数据




