本系统是一种利用物联网、大数据、云计算、人工智能等现代信息技术,对建筑施工现场进行综合管理和智能决策支持的系统。它通过对施工现场的人、机、料、法、环等要素进行全面感知、互联互通和智能分析,实现工地的数字化、网络化和智能化,提高施工现场的管理效率、安全性和工程质量。以下是对智慧工地系统的详细介绍:
一、系统架构
智慧工地系统通常包括感知层、网络层、平台层和应用层四个层级:
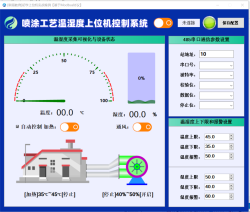
感知层:通过安装各种传感器和监测设备(如视频监控、温湿度传感器、噪声监测仪等),实现对施工现场环境的实时监测和数据采集。
网络层:利用有线或无线网络技术,将感知层采集的数据传输到平台层。网络层可以包括局域网、互联网、移动通信网络等。
平台层:平台层是系统的核心,负责数据的存储、处理和分析。它通常包括数据中心、云计算平台和大数据分析引擎。
应用层:应用层提供各种具体的应用服务,如工地安全管理、人员管理、材料管理、进度管理等,通过用户界面(如Web应用、移动APP等)与用户交互。
二、核心功能
智慧工地系统的核心功能包括:
安全管理:通过视频监控、危险源监测、安全巡检等手段,实时监控施工现场的安全状况,及时发现并